Les roues Mecanum permettent un mouvement omnidirectionnel de la base roulante du robot
Chaque jeu de roues Mecanum (REV-45-1655) est livré avec deux roues Mecanum droite (REV-41-1656) et deux roues Mecanum gauche (REV-41-1657). Ceci est déterminé par la direction du bord d’attaque des rouleaux. Si les rouleaux sont orientés vers la gauche, il s’agit d’une roue gauche et s’ils sont orientés vers la droite, il s’agit d’une roue droite.
 |
 |
Chaque côté du châssis a besoin d’une roue gauche et d’une roue droite. Les châssis Mecanum ont également besoin de quatre moteurs pour fonctionner.
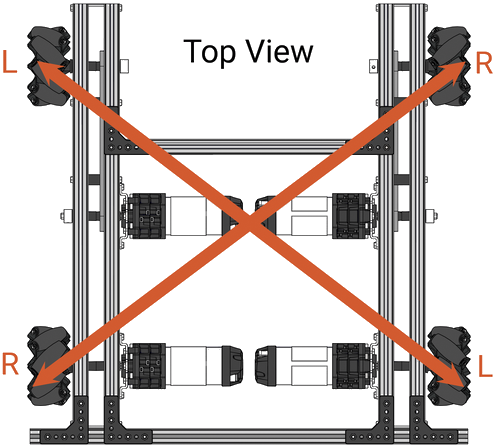
Pour savoir si vos roues Mecanum sont correctement configurées, regardez de haut en bas sur la chaîne cinématique. Les lignes diagonales créées par l’angle des galets doivent former un « X » comme indiqué ci-dessus.
Comportement de la transmission des roues Mecanum
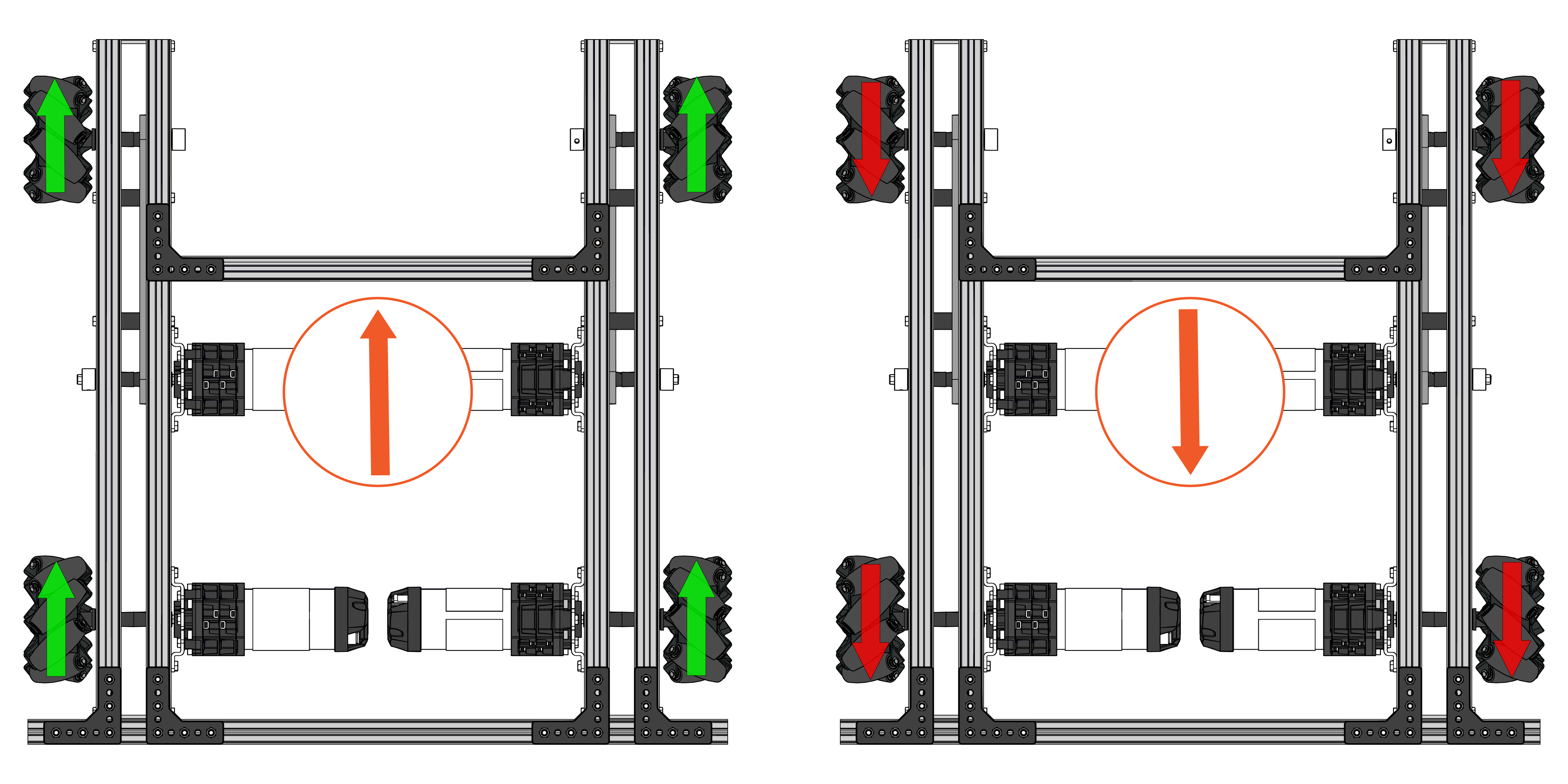
Le fait de faire tourner les quatre roues dans la même direction à la même vitesse entraîne un mouvement avant/arrière, car les vecteurs de force longitudinaux s’additionnent mais les vecteurs transversaux s’annulent, comme le montre le schéma ci-dessous.
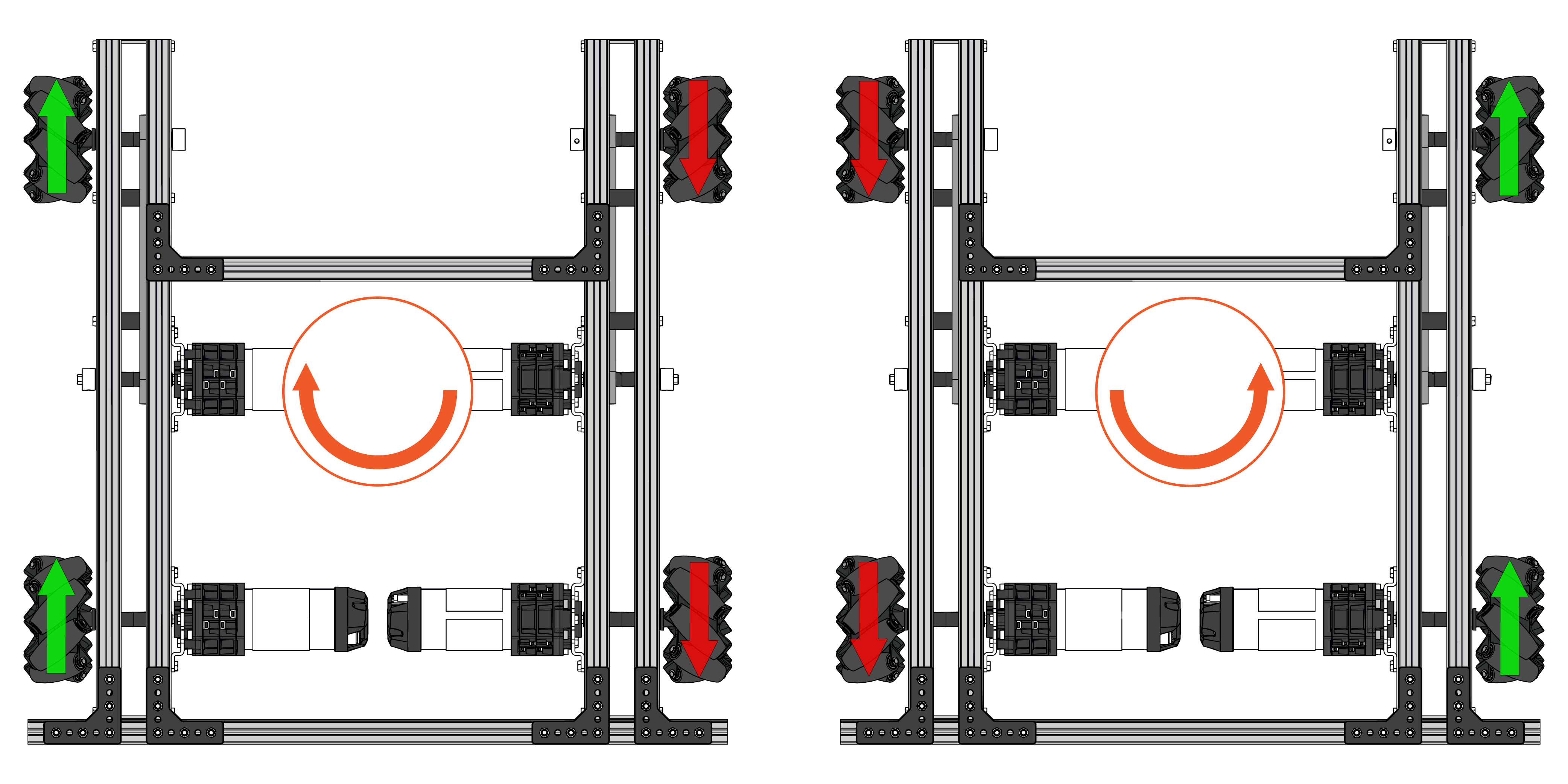
Lorsque les deux roues d’un côté se déplacent dans une direction tandis que l’autre côté se déplace dans la direction opposée, il en résulte une rotation autour de l’axe vertical central de la transmission, comme illustré ci-dessous.
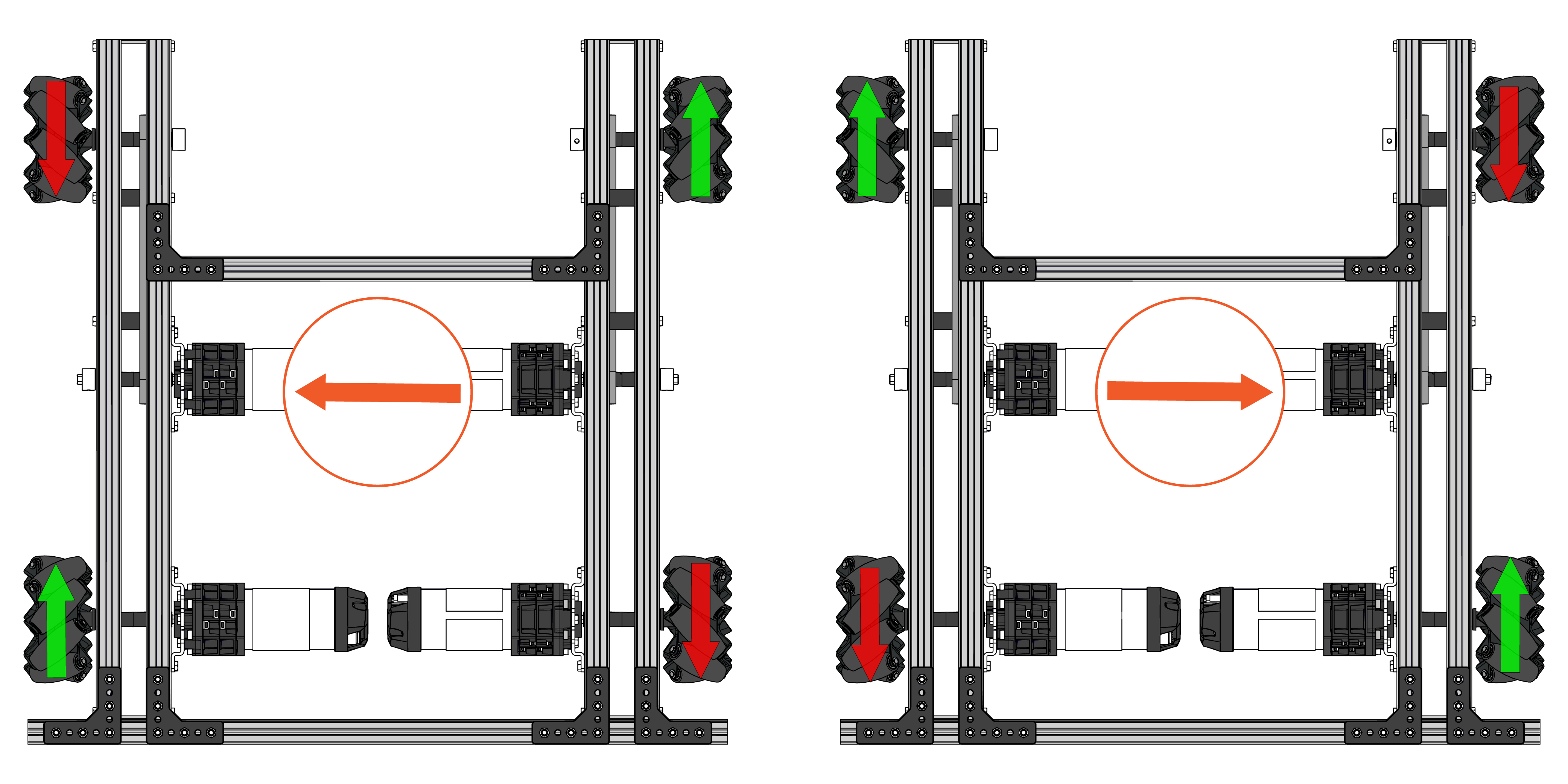
Lorsque les roues du mécanisme droit tournent dans une direction tandis que les roues du mécanisme gauche tournent dans la direction opposée, on obtient un mouvement latéral.
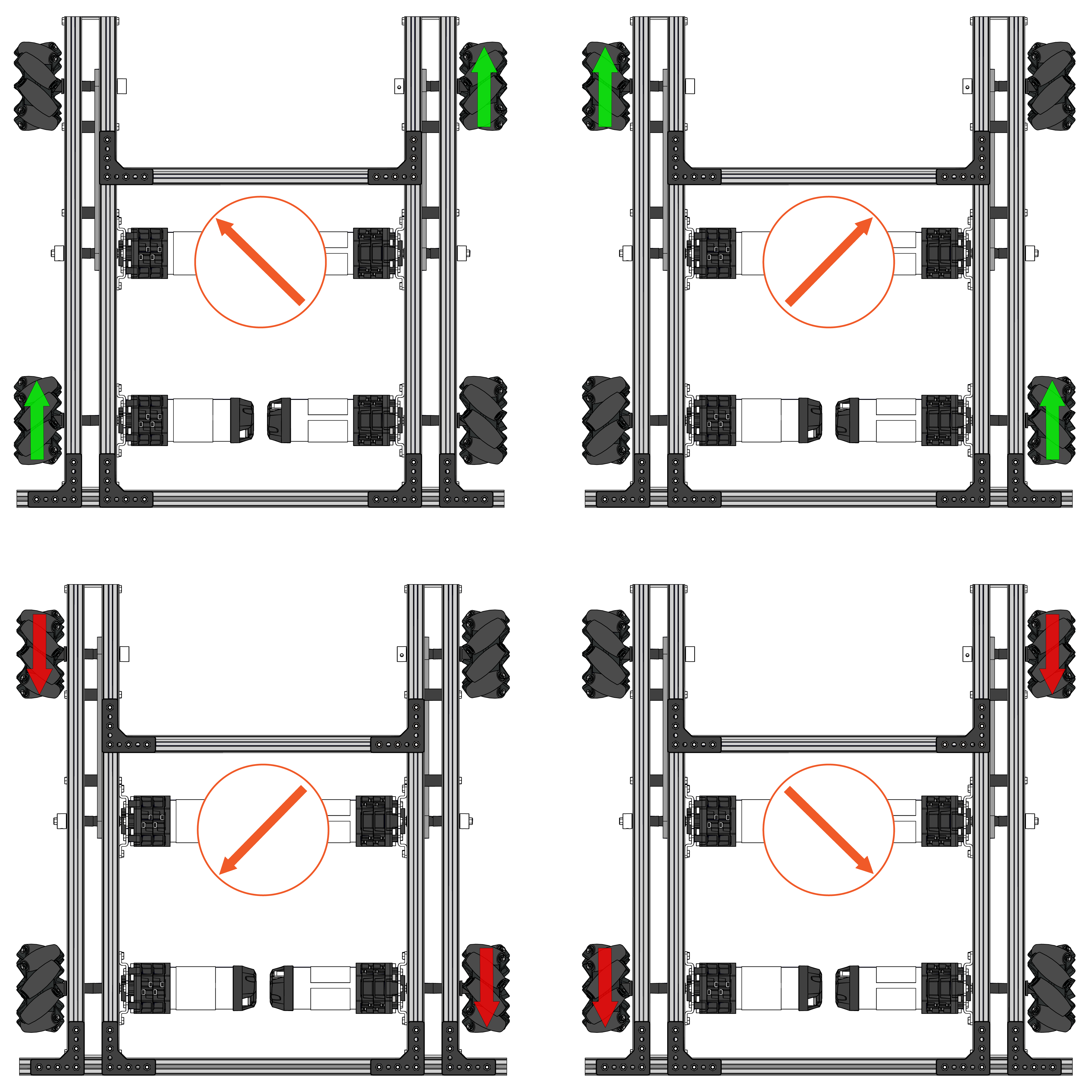
L’utilisation des concepts ci-dessus en tandem, en faisant varier la puissance du moteur pour chaque type de roue, permet au groupe motopropulseur de se déplacer selon des vecteurs angulaires différents.
Liens vers des exemples de programmation Java à disposition des néophytes
Il y a deux modes de contrôle opérateur possibles :
- Le mode “Robot-Centric” centré sur le robot où le joystick contrôle la direction du robot par rapport au châssis du robot.
- Le mode “Field-Centric” centré sur le terrain " où le joystick contrôle la direction du robot par rapport au champ de vision de l’opérateur.
Lien : Mecanum TeleOp
Exemple de programmation Java en mode autonome :
Lien : Drivetrain Control